Well, these are not going to be optional, they will be installed from day 0. It is more that the use of them is for providing lesser importance services, that is, things someone can live without.
But since someone can live without all of this ship computer, this is not much of a distinction, is it!
Back to the subject, the "optional" modules that will be used from day 1, have as follows:
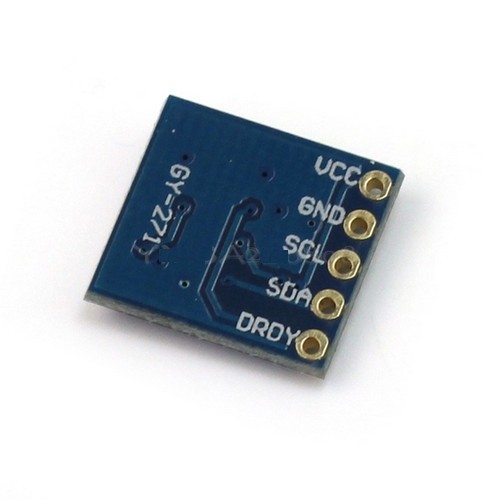
1. Barometric Sensor (BMP085)
This one:
 This is an I2C device and as such, it will be connected the same way the magnetometers are.
This is an I2C device and as such, it will be connected the same way the magnetometers are.
Obviously, this will be used for providing Atmospheric Pressure and the UI will also have a graph of the atmospheric pressure of the last 24 hours.
2. Accelerometer (ADXL345-based)
This one:
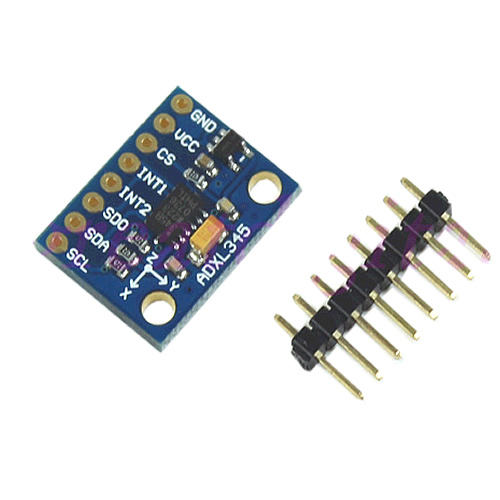 I2C-based. Will be used for logging of the sea condition. It's a bit of a gimmick but the readings could also be used as inclinometer!
I2C-based. Will be used for logging of the sea condition. It's a bit of a gimmick but the readings could also be used as inclinometer!
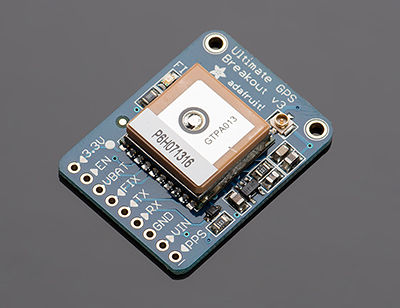
3. Noise Sensor

This will be placed under the cockpit, to the left side of the boat, as close as possible to where the outboard is fixed. That way, there's going to be a engine run-hours log! (I might add tachometer functionality at a later stage).
4. Ampere Sensor
The whole system relies on a single 12V battery for operation. I have a solar panet and charger, by using a Ampere Sensor connected straight to the battery, I will monitor charging and discharging.
The sensor that will be used is this one:
 This sensor has an analog output, which has the value VCC/2 when there is no current flowing, and it changes 185mV per Ampere flowing plus or minus the 0 Amp voltage depending on the direction of the current.
This sensor has an analog output, which has the value VCC/2 when there is no current flowing, and it changes 185mV per Ampere flowing plus or minus the 0 Amp voltage depending on the direction of the current.
That way, I can have an indication of charging or discharging of the battery and the amperage of the current.
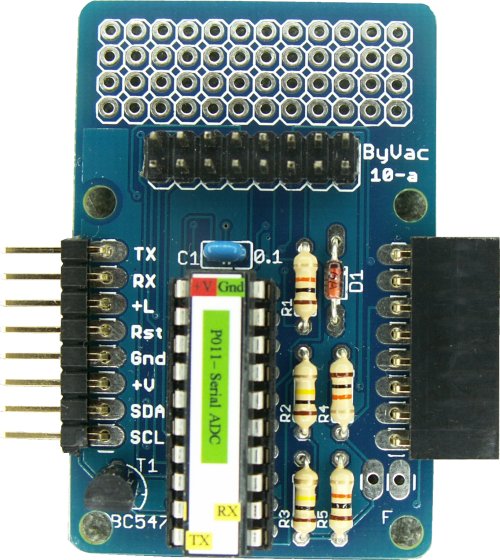
This sensor will by connected to the I2C ADC board that was mentioned on the previous post.
Now that I am to it, and since there are 5 analog unused inputs, I might use an input (through a voltage divider) to measure battery voltage.
That's it about the additional hardware, on the next post I will provide descriptions of system operation, both for version 1 and version 2 of software.
Regards!
But since someone can live without all of this ship computer, this is not much of a distinction, is it!
Back to the subject, the "optional" modules that will be used from day 1, have as follows:
1. Barometric Sensor (BMP085)
This one:
Obviously, this will be used for providing Atmospheric Pressure and the UI will also have a graph of the atmospheric pressure of the last 24 hours.
2. Accelerometer (ADXL345-based)
This one:
3. Noise Sensor
This will be placed under the cockpit, to the left side of the boat, as close as possible to where the outboard is fixed. That way, there's going to be a engine run-hours log! (I might add tachometer functionality at a later stage).
4. Ampere Sensor
The whole system relies on a single 12V battery for operation. I have a solar panet and charger, by using a Ampere Sensor connected straight to the battery, I will monitor charging and discharging.
The sensor that will be used is this one:
That way, I can have an indication of charging or discharging of the battery and the amperage of the current.
This sensor will by connected to the I2C ADC board that was mentioned on the previous post.
Now that I am to it, and since there are 5 analog unused inputs, I might use an input (through a voltage divider) to measure battery voltage.
That's it about the additional hardware, on the next post I will provide descriptions of system operation, both for version 1 and version 2 of software.
Regards!